








Activity-Agenda / Job-Report
Afternoon Activities in ERASMUS+
Tuesday, 15. 09. 2020
HYBRID-SESSION 03
5 participants, 14:00 - 14:30, Room 52
Ma, Se, Ad, Ak, Dz
5 participants, 14:30 - 14:45, Homeoffice
Ag, Vi, Ha, Ti, Vo
10 participants, 14:45 - 15:30, Room 52&Homeoffice
Ma, Se, Ad, Ak, Dz, Ag, Vi, Ha, Ti, Vo
5 participants, 15:30 - 15:45, Homeoffice
Ag, Vi, Ha, Ti, Vo
Video-Cooperation in Robotics:
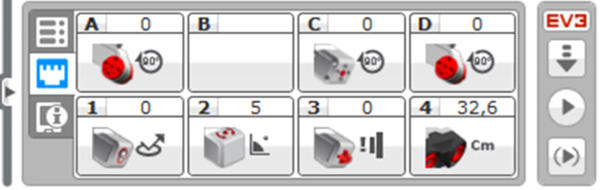
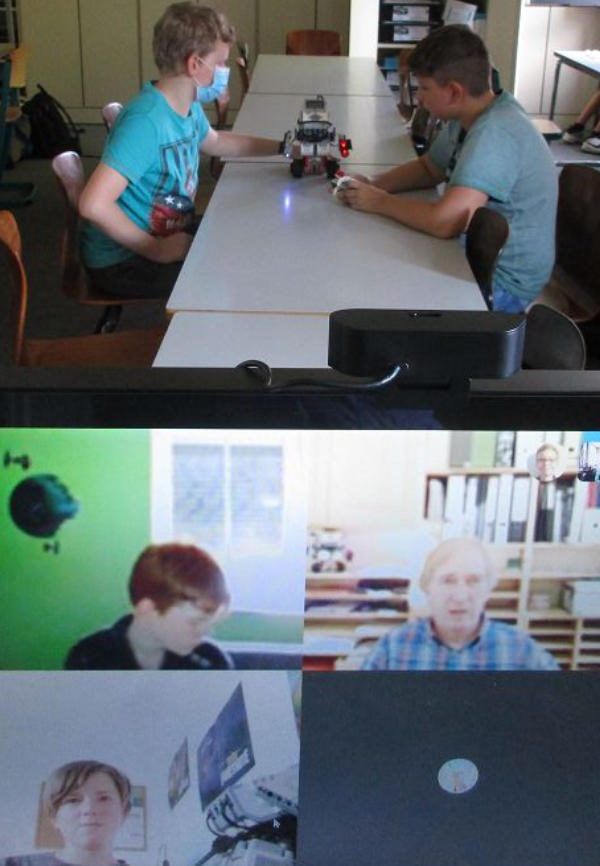
- Camera focussing to the room; whiteboard shows monitor.
- Dz is supporting installation of the last SKYPE-account.
- Dz is guiding the students to the platform OX.
- Ak sends feedback from last session.
- Ha and Vo fix an appointment for Laptop-Exchange in order
to have more programs and printer.
- The HomeOffice is running poorly today:
Ag solves the connection-problem by means of his smartphone.
Vi detects problems with his headset-microphone. He can understand Vo and Video is
running in both directions. Vi presumes, that his headset-micro is not compatible with SKYPE.
Ti cannot activate his camera; just his account-symbol is shown.
We communicate by chats.
Ha is checking wiring and chooses the right length for each connection.
- Vo is connected via SKYPE with the students
in the school´s IT-Room:
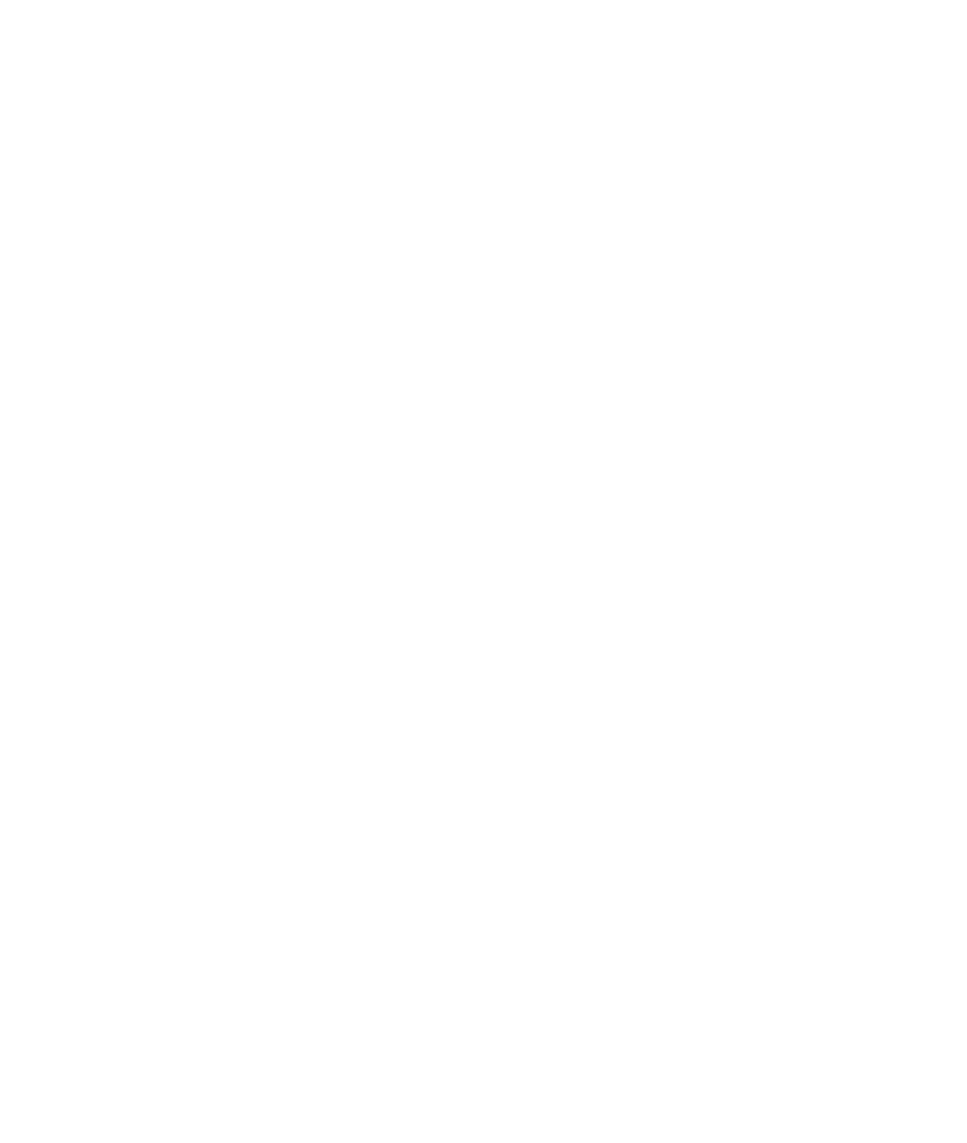
Connection-Check of our construction, using
LEGO-Mindstorms by LabVIEW-Software.
Students compare their wirings by a wiring
diagramm in the right / bottom corner of their
monitors with the wiring diagramm shown
above: Motor A is right leg (view from rear)!
Red arrows of GYROSENSOR on INPUT 2 are visible on right side of GYROBOY.
- A mistake is detected by Ad and Ma: Input 01 and 04 are transposed.
Test now! GYROBOY reacts, as if an obstacle was across his way.
Ah, the ULTRASONIC-SENSOR is looking down instead forward.
In a jiffy the problem is solved. Now we start the next test!
- Marvellous! The GYROBOY is balancing; almost DEEP-RELAXED, contrary to
that, which has been presented by Vo. That one seemed to be nervous.
- After completion and check of the construction, we shall excercise simple
steering jobs using the coloured blocks, connected to the launching ramp.
Ad and Ma are constructing a new one, smarter to use.
- Next idea, developped by Ma and Ad: Let the colour-sensor look down! Then
we can cause direction just by colours on the road automatically.
Feedback participants and teachers:

ICT+ROBOTICs+ETHICs
Choice of Educational Material and Subjects
in Non Formal Learning Environment (elective subjects and courses)
related to the level of intellectual development of students

Aktivitätsplan/ Arbeitsbericht
Aktionsnachmittag im Programm ERASMUS+
Dienstag, 15. 09. 2020
HYBRID-SESSION 03
5 Teilnehmer*innen, 14:00 - 14:30, Raum 52
Ma, Se, Ad, Ak, Dz
5 Teilnehmer*innen, 14:30 - 14:45, im Homeoffice
Ag, Vi, Ha, Ti, Vo
10 Teilnehmer*innen, 14:45 - 15:30, R52&Homeoffice
Ma, Se, Ad, Ak, Dz, Ag, Vi, Ha, Ti, Vo
5 Teilnehmer*innen, 15:30 - 15:45, im Homeoffice
Ag, Vi, Ha, Ti, Vo
Video-Kooperation in Robotics:
- Kamera zum Unterrichtsraum; Monitorbild am Whiteboard.
- Dz unterstützt die Installation eines letzten SKYPE-Accounts.
- Dz führt die Schüler*innen durch die Anmeldeprozedur OX.
- Ak gibt Rückmeldung zum 8.9.2020.
- Ha verabredet Laptopaustausch mit Vo für weitere
Programme und Drucker.
- Im Homeoffice gibt es heute Verbindungsprobleme:
Ag überbrückt die defekte Leitung mittels SKYPE by SMARTPHONE.
Vi kann sein Micro nicht aktivieren. Er meint, sein Headsetmicro werde von SKYPE nicht erkannt;
wir sehen einander und Vi kann Vo hören.
Ti kann seine Kamera nicht aktivieren; es erscheint lediglich sein Accountsymbol.
Wir verständigen uns dennoch über Chats.
Ha überprüft Kabel und ordnet den jeweiligen Verbindungen die richtige Länge zu.
- Vo hat mit dem Computerraum in der HGS
Kontakt via SKYPE:
Verbindungstest unserer Konstruktion mittels
LEGO-Mindstorms by LabView-Software:
Die Teilnehmer vergleichen das Schaltbild ihrer
Konstruktion, welches ihr Monitor unten rechts
anzeigt, mit dem oben gezeigten Schaltbild:
Motor A ist rechts (von hinten betrachtet)!
Rote Pfeile des GYROSENSORS an Eingang 2 sind an der rechten Seite zu sehen.
- Ma und Ad entdecken einen Fehler: Input 1 und 4 sind vertauscht.
Nun wird getestet! Der GYROBOY reagiert, als ob ein Hindernis im Weg wäre.
Aha, der ULTRASCHALLSENSOR schaut zur Fahrbahn er muss nach vorn weisen.
Ruck-zuck ist das Problem behoben. Nächster Test:
- Wunderbar! Der GYROBOY balanciert sich aus, geradezu TIEFENENTSPANNT, im
Gegensatz zum Muster von Vo, welches eher zappelig wirkte.
- Nach Fertigstellung und Überprüfung der Konstruktion erfolgen einfache
Übungen zur Steuerung des GYROBOY mit den Farbbausteinen der Startrampe.
Ad und Ma bauen eine neue, einfacher zu handhabende Steuerung.
- Eine weitere Idee von Ad und Ma: Wenn der Fabsensor nach unten weist, kann
man den GYROBOY mittels Farben auf der Fahrbahn steuern.
Feedback Teilnehmer*innen und Lehrkräfte:



Holstentor-
Gemeinschaftsschule
mit Ganztagsangebot
2023 04 03 1622
ICT+ROBOTICs+ETHICs
Inhalte, Methoden, Systeme, Materialien
in nonformaler Lernumgebung (frei wählbare AGn oder Kurse)
differenziert nach Entwicklungsstand der SchülerInnen
Szkoły Okrętowe i Techniczne













- AM Arrow Robot School
- AM Nitro 01 Colour Sorter
- AM Nitro 02 Corona Fighter
- AM Nitro 03 Autonomous Bus
- AM SoLe Obstacle
- AM Legorian 01 RoboDraw
- AM Legorian 02 Stairclimber
- AM Legorian 03 GyroBoy
- AM Legorian 04 Software
- AM Legorian 05 Workshop
- AM Thunderbird MAC OS
- AM Zorro Dance
- AM LiMa PullChallenge
- AM LiWa 01 Remote Robot
- AM Shower 01 DedicTrace
- AM Shower 02 Trace Follow
- AM Shower 03 Remote
- AM Shower 04 Remote Grip
- AM Shower 05 Camera Remote


- Just Unboxing ore more?
- Assembling a Vehicle
- Program Drive
- Program Dance
- Program Traffic Light
- Program WelcomeParadeFun
- Program Fan
- ERASMUS+ LABEL SCHOOL ENTRANCE
- Paper Tasks and more
- Program LineFollower
- Preparation Meeting Gdansk PL
- Twinspace cancelled but...
- Keep on Running
- Miniatur Wunderland
- Construction Colour Sorter
- Programming Colour Sorter
- Modifications
- Lifter Constructions
- General Feedback
- Remote Control
- eTwin Check
- Video Conferences
- Prep-Meeting
- Hybrid-Session 01 SKYPE
- Hybrid-Session 02 Gyro
- Hybrid-Session 03 OX
- Hybrid-Session 04 Climb
- Hybrid-Session 05 Parcours
- Hybrid-Session 06 ColourTrace
- Hybrid-Session 07 ScrachMistake
- Home-Session 01 Ethics
- Home-Session 02 About Robotic
- Home-Session 03 Feedback
- Home-Session 04 BigBlueButton
- Home-Session 05 EV3 Home
- Home-Session 06 EV3 Classroom
- Individual Sessions Micro:Bit
- Home-Session 07 PullTest
- Home-Session 08 LabView vs Classroom
- Home-Session 09 WarRobot
- Home-Session 10 -12 TRACK3R




- Save the Project!
- Teams Online 01 eTwin vs SKYPE
- Teams Online 02 Schedule
- Teams Online 03 Lockdown
- Teams Online 04 Future
- Teams Online 05 Equipment
- Teams Online 06 TraficLight
- Teams Online 07 OpenRoberta
- Teams Online 08 Applications
- Teams Online 09 SocialSciences
- Teams Online 10/11/12/13/14
- Teams Online 15/16 Organization
- Teams Online 17/18/19 Alternatives
- Teams Online 20 Scratch
- Teams Online 21 Ethics
- Teams Online 22/23/24 25/26 Lock
- Teams Online 27 Other Software
- Teams Online 28 Assocoated Sciences
- Teams Online 29 Pandemic
- Teams Online 30 Choice of Software
- Teams Online 31 Robot Cooperation
- Teams Online 32 WLAN
- Teams Online 33 micro:rover
- Teams Online 34/35/36 Array?
- Teams Online 37/38 About Robototics









